Weiyi Xue’s Homepage
💫About Me
I am currently a second-year M.S.E. student at GEAI Lab of Tongji University and advised by Prof. Guang Chen. Before this, I obtained the bachelor’s degree in Vehicle Engineering at Tongji University.
My research centers on exploring the intersection of generative modeling and 3D vision, with a particular emphasis on problems such as 3D content generation and 3D-aware video generation. Looking further ahead, I am deeply interested in the broader potential of world models and generative models, both from theoretical perspectives and in terms of their practical applications.
🔥News
[2025/09] Invited as a Reviewer for ICLR, CVPR.
[2025/09] 🎉 One paper accepted to NeurIPS 2025.
[2025/07] Invited as a Reviewer for AAAI.
[2025/05] Invited as a Reviewer for NeurIPS.
[2025/05] Started an internship at DJI, machine learning group, Shenzhen, China.
[2024/09] 🎉 One paper on pose-free reconstruction accepted to NeurIPS 2024.
[2024/02] 🎉 One paper on dynamic scene reconstruction accepted to CVPR 2024.
[2023/10] 🎉 One paper on point cloud registration accepted to WACV 2024.
[2023/06] Graduated with a Bachelor’s degree from Tongji University, Shanghai, China.
📝Publications
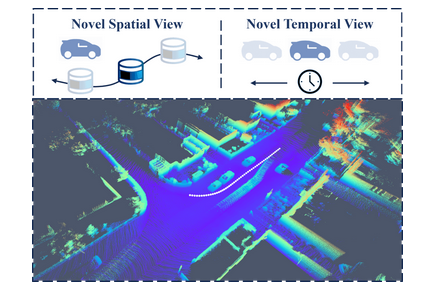
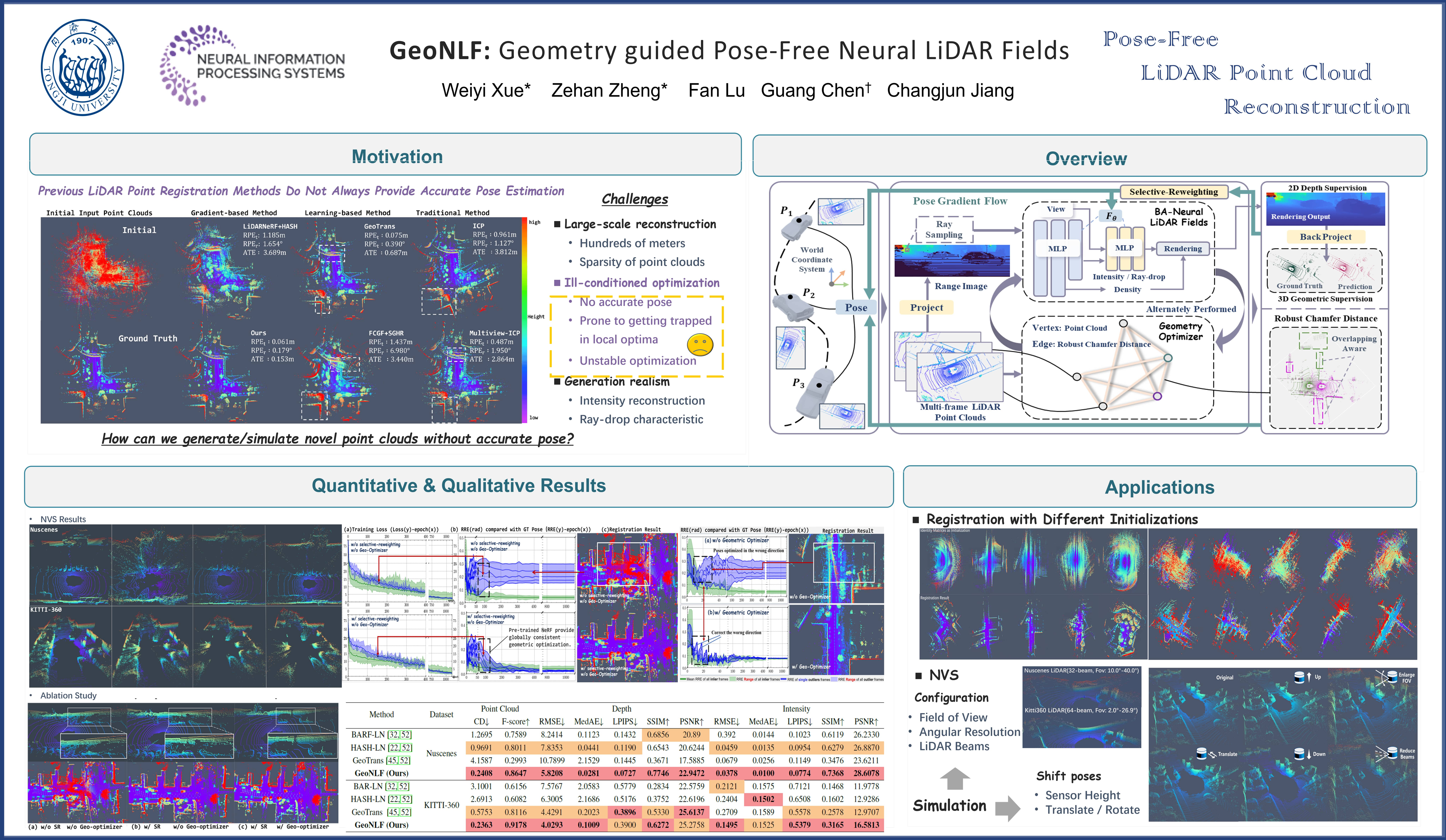
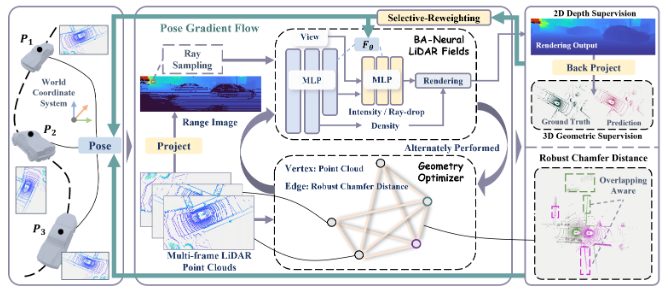 | "GeoNLF: Geometry guided Pose-Free Neural LiDAR Fields" Weiyi Xue, Zehan Zheng, Fan Lu, Haiyun Wei, Guang Chen†, Changjun Jiang. NeurIPS 2024 Arxiv Poster Code We explore the geometric insights of point clouds, which provide explicit registration priors for reconstruction. Based on this, we propose Geometry guided Neural LiDAR Fields(GeoNLF), a hybrid framework performing alternately global neural reconstruction and pure geometric pose optimization. |
 | "LiDAR4D: Dynamic Neural Fields for Novel Space-time View LiDAR Synthesis" Zehan Zheng, Fan Lu, Weiyi Xue, Guang Chen†, Changjun Jiang. CVPR 2024 Arxiv Poster Code Slides Differentiable LiDAR-only framework for novel space-time LiDAR view synthesis, which reconstructs dynamic driving scenarios and generates realistic LiDAR point clouds end-to-end. It also supports simulation in the dynamic scene. |
 | "HDMNet: AHierarchical Matching Network with Double Attention for Large-scale Outdoor LiDAR Point Cloud Registration" Weiyi Xue, Fan Lu, Guang Chen†. WACV 2024 Paper We proposed a feature consistency enhanced double-soft matching network for large-scale outdoor scene point cloud registration, achieving two-stage matching with high flexibility while enlarging the receptive field in a patch-to-patch manner. |
{kind=link}
💻Research Experience
July 2023 - Present
Research Assistant - Generalist Embodied AI Lab (GEAI Lab), Tongji University
Advisor: Prof. Guang Chen
Research included: 3D/4D reconstruction, Diffusion ModelsApril 2025 - Present
Research Intern - Machine Learning Group, DJI
Research included: MLLMs, 3D/4DGSJuly 2023 - Present
Research Assistant - Integrated Positioning Lab (IPLab), Tongji University
Advisor: Prof. Lu Xiong
Research included: SLAM, Point Cloud
🛠️Engineering Experience
- 2019 - 2020
National-level Undergraduate Innovation Training Program
Team leader
Self-adjusting Rearview Mirror Based on Human Eye Key Point Recognition, and successfully finalized and concluded the project. The Bronze Award in the ”Challenge Cup” National Undergraduate Extracurricular Academic Science and Technology Works Competition.
🏆Honors and Awards
- Scholar award of NeurIPS, 2025
- Outstanding Student of Tongji University, 2021
- First Prize of Tongji University Scholarship (Top 5%), 2021
- Silver Award in the China International College Students’ Innovation Competition, 2020
- The Bronze Award in the ”Challenge Cup” National Undergraduate Extracurricular Academic Science and Technology Works Competition, 2020